
Franka Kitchen¶
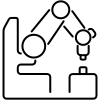
Multitask environment in which a 9-DoF Franka robot is placed in a kitchen containing several common household items. The goal of each task is to interact with the items in order to reach a desired goal configuration.
The tasks can be selected when the environment is initialized passing a list of tasks to the tasks_to_complete argument as follows:
import gymnasium as gym
import gymnasium_robotics
gym.register_envs(gymnasium_robotics)
env = gym.make('FrankaKitchen-v1', tasks_to_complete=['microwave', 'kettle'])
The possible tasks to complete are:
Task |
Description |
|---|---|
|
twist control knob to activate bottom left burner in the stove. |
|
twist control knob to activate top left burner in the stove. |
|
move a lever switch to turn on a light over the burners. |
|
slide open the cabinet door. |
|
open a hinge cabinet door. |
|
open the microwave door. |
|
move the kettle from the bottom burner to the top burner. |
References¶
These environments were first introduced in “Relay Policy Learning: Solving Long-Horizon Tasks via Imitation and Reinforcement Learning” by Abhishek Gupta, Vikash Kumar, Corey Lynch, Sergey Levine, Karol Hausman, and later modified in “D4RL: Datasets for Deep Data-Driven Reinforcement Learning” by Justin Fu, Aviral Kumar, Ofir Nachum, George Tucker, Sergey Levine. Both publications can be cited as follows:
@article{gupta2019relay,
title={Relay policy learning: Solving long-horizon tasks via imitation and reinforcement learning},
author={Gupta, Abhishek and Kumar, Vikash and Lynch, Corey and Levine, Sergey and Hausman, Karol},
journal={arXiv preprint arXiv:1910.11956},
year={2019}
}
@misc{fu2020d4rl,
title={D4RL: Datasets for Deep Data-Driven Reinforcement Learning},
author={Justin Fu and Aviral Kumar and Ofir Nachum and George Tucker and Sergey Levine},
year={2020},
eprint={2004.07219},
archivePrefix={arXiv},
primaryClass={cs.LG}
}