
ManySegmentSwimmer¶
This Environment is part of MaMuJoCo environments. Please read that page first for general information. The task is variation of Gymansium’s MuJoCo/Swimmer, which instead of having 2 segments, it has configurable amount of segments.
The task was first introduced by Christian A. Schroeder de Witt in “FACMAC: Factored Multi-Agent Centralised Policy Gradients”
Action Space¶
The shape of the action space depends on the partitioning. The partitioning has the following form: ${Number Of Agents}x${Number Of Segments per Agent}
Instantiate |
|
|---|---|
Agents |
|
Number of Agents |
|
Action Spaces |
|
Part partition |
|
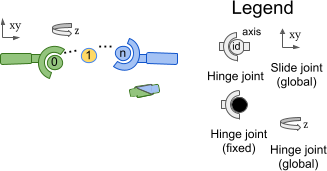
The environment is partitioned in ${Number Of Agents} parts, with each part corresponding to ${Number Of Segments per Agent} joints.
Agent 0 action space¶
Num |
Action |
Control Min |
Control Max |
Name (in corresponding XML file) |
Joint |
Unit |
|---|---|---|---|---|---|---|
0 |
Torque applied on the first rotor |
-1 |
1 |
motor1_rot |
hinge |
torque (N m) |
1 |
Torque applied on the second rotor |
-1 |
1 |
motor2_rot |
hinge |
torque (N m) |
… |
… |
-1 |
1 |
… |
hinge |
torque (N m) |
|
Torque applied on the agent’s last rotor |
-1 |
1 |
motor |
hinge |
torque (N m) |
Agent 1 action space¶
Num |
Action |
Control Min |
Control Max |
Name (in corresponding XML file) |
Joint |
Unit |
|---|---|---|---|---|---|---|
0 |
Torque applied on the |
-1 |
1 |
??? |
hinge |
torque (N m) |
… |
… |
-1 |
1 |
… |
hinge |
torque (N m) |
|
Torque applied on the agent’s last rotor |
-1 |
1 |
motor |
hinge |
torque (N m) |
Agent … action space¶
…
Observation Space¶
Observation Categories |
|
|---|---|
Default |
|
Default |
|
Supported observation categories |
|
Besides the local observation of each agent (which depend on their parts of the agent, the observation categories and the observation depth), each agent also observes the position and velocity items of the swimmer’s tip. See more at the Gymnasium’s Swimmer.
Rewards¶
All agents receive the same Gymnasium’s Swimmer reward.
Starting state¶
The starting state of the environment is the same as Gymnasium’s Swimmer.
Episode End¶
All agent terminate and truncate at the same time, given the same conditions as Gymnasium’s Swimmer.
Version History¶
v1:
Now based on
Gymnasium/MuJoCo-v5instead ofGymnasium/MuJoCo-v4(https://github.com/Farama-Foundation/Gymnasium/pull/572).Now uses the same
option.timestepasGymansum/Swimmer(0.01).Updated model to work with
mujoco>=3.0.0.
v0: Initial version release, uses Gymnasium.MuJoCo-v4, and is a fork of the original MaMuJoCo schroederdewitt/multiagent_mujoco.