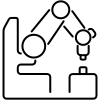

Hopper¶
This Environment is part of MaMuJoCo environments. Please read that page first for general information. The task is Gymansium’s MuJoCo/Hopper.
Action Space¶
The shape of the action space depends on the partitioning. The partitioning has the following form:
if partitioning is None:¶
Instantiate |
|
|---|---|
Agents |
|
Number of Agents |
1 |
Action Spaces |
|
Part partition |
|
If partitioning, is None, then the environment contains a single agent with the same action space as Gymansium’s MuJoCo/Half_Cheetah.
Num |
Action |
Control Min |
Control Max |
Name (in corresponding XML file) |
Joint |
Unit |
|---|---|---|---|---|---|---|
0 |
Torque applied on the thigh rotor |
-1 |
1 |
thigh_joint |
hinge |
torque (N m) |
1 |
Torque applied on the leg rotor |
-1 |
1 |
leg_joint |
hinge |
torque (N m) |
2 |
Torque applied on the foot rotor |
-1 |
1 |
foot_joint |
hinge |
torque (N m) |
if partitioning == “3x1”: # each joint¶
Instantiate |
|
|---|---|
Agents |
|
Number of Agents |
3 |
Action Spaces |
|
Part partition |
|
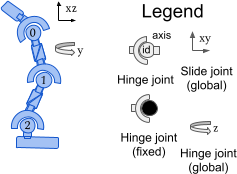
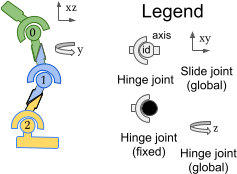
The environment is partitioned in 3 parts, each part corresponding to a single joint.
Agent 0 action space¶
Num |
Action |
Control Min |
Control Max |
Name (in corresponding XML file) |
Joint |
Unit |
|---|---|---|---|---|---|---|
0 |
Torque applied on the thigh rotor |
-1 |
1 |
thigh_joint |
hinge |
torque (N m) |
Agent 1 action space¶
Num |
Action |
Control Min |
Control Max |
Name (in corresponding XML file) |
Joint |
Unit |
|---|---|---|---|---|---|---|
0 |
Torque applied on the leg rotor |
-1 |
1 |
leg_joint |
hinge |
torque (N m) |
Agent 2 action space¶
Num |
Action |
Control Min |
Control Max |
Name (in corresponding XML file) |
Joint |
Unit |
|---|---|---|---|---|---|---|
0 |
Torque applied on the foot rotor |
-1 |
1 |
foot_joint |
hinge |
torque (N m) |
Observation Space¶
Observation Categories |
|
|---|---|
Default |
|
Default |
|
Supported observation categories |
|
Besides the local observation of each agent (which depend on their parts of the agent, the observation categories and the observation depth), each agent also observes the position and velocity items of the hopper’s top. See more at the Gymnasium’s Hopper.
Rewards¶
All agents receive the same Gymnasium’s Hopper reward.
Starting state¶
The starting state of the environment is the same as Gymnasium’s Hopper.
Episode End¶
All agent terminate and truncate at same time given the same conditions as Gymnasium’s Hopper.
Version History¶
v1:
Now based on
Gymnasium/MuJoCo-v5instead ofGymnasium/MuJoCo-v4(https://github.com/Farama-Foundation/Gymnasium/pull/572).
v0: Initial version release, uses Gymnasium.MuJoCo-v4, and is a fork of the original MaMuJoCo schroederdewitt/multiagent_mujoco. Changes from the original
MaMuJoCo(schroederdewitt/multiagent_mujoco):Fixed Global observations (The Hopper’s top:
rootx,rooty,rootz) not being observed.