
Adroit Door¶

Description¶
This environment was introduced in “Learning Complex Dexterous Manipulation with Deep Reinforcement Learning and Demonstrations” by Aravind Rajeswaran, Vikash Kumar, Abhishek Gupta, Giulia Vezzani, John Schulman, Emanuel Todorov, and Sergey Levine.
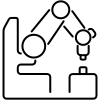
The environment is based on the Adroit manipulation platform, a 28 degree of freedom system which consists of a 24 degrees of freedom ShadowHand and a 4 degree of freedom arm. The task to be completed consists on undoing the latch and swing the door open. The latch has significant dry friction and a bias torque that forces the door to stay closed. Agent leverages environmental interaction to develop the understanding of the latch as no information about the latch is explicitly provided. The position of the door is randomized. Task is considered complete when the door touches the door stopper at the other end.
Action Space¶
The action space is a Box(-1.0, 1.0, (28,), float32). The control actions are absolute angular positions of the Adroit hand joints. The input of the control actions is set to a range between -1 and 1 by scaling the real actuator angle ranges in radians.
The elements of the action array are the following:
Num |
Action |
Control Min |
Control Max |
Angle Min |
Angle Max |
Name (in corresponding XML file) |
Joint |
Unit |
|---|---|---|---|---|---|---|---|---|
0 |
Linear translation of the full arm towards the door |
-1 |
1 |
-0.3 (m) |
0.5 (m) |
A_ARTz |
slide |
position (m) |
1 |
Angular up and down movement of the full arm |
-1 |
1 |
-0.4 (rad) |
0.25 (rad) |
A_ARRx |
hinge |
angle (rad) |
2 |
Angular left and right and down movement of the full arm |
-1 |
1 |
-0.3 (rad) |
0.3 (rad) |
A_ARRy |
hinge |
angle (rad) |
3 |
Roll angular movement of the full arm |
-1 |
1 |
-1.0 (rad) |
2.0 (rad) |
A_ARRz |
hinge |
angle (rad) |
4 |
Angular position of the horizontal wrist joint (radial/ulnar deviation) |
-1 |
1 |
-0.524 (rad) |
0.175 (rad) |
A_WRJ1 |
hinge |
angle (rad) |
5 |
Angular position of the horizontal wrist joint (flexion/extension) |
-1 |
1 |
-0.79 (rad) |
0.61 (rad) |
A_WRJ0 |
hinge |
angle (rad) |
6 |
Horizontal angular position of the MCP joint of the forefinger (adduction/abduction) |
-1 |
1 |
-0.44 (rad) |
0.44(rad) |
A_FFJ3 |
hinge |
angle (rad) |
7 |
Vertical angular position of the MCP joint of the forefinger (flexion/extension) |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_FFJ2 |
hinge |
angle (rad) |
8 |
Angular position of the PIP joint of the forefinger (flexion/extension) |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_FFJ1 |
hinge |
angle (rad) |
9 |
Angular position of the DIP joint of the forefinger |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_FFJ0 |
hinge |
angle (rad) |
10 |
Horizontal angular position of the MCP joint of the middle finger (adduction/abduction) |
-1 |
1 |
-0.44 (rad) |
0.44(rad) |
A_MFJ3 |
hinge |
angle (rad) |
11 |
Vertical angular position of the MCP joint of the middle finger (flexion/extension) |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_MFJ2 |
hinge |
angle (rad) |
12 |
Angular position of the PIP joint of the middle finger (flexion/extension) |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_MFJ1 |
hinge |
angle (rad) |
13 |
Angular position of the DIP joint of the middle finger |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_MFJ0 |
hinge |
angle (rad) |
14 |
Horizontal angular position of the MCP joint of the ring finger (adduction/abduction) |
-1 |
1 |
-0.44 (rad) |
0.44(rad) |
A_RFJ3 |
hinge |
angle (rad) |
15 |
Vertical angular position of the MCP joint of the ring finger (flexion/extension) |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_RFJ2 |
hinge |
angle (rad) |
16 |
Angular position of the PIP joint of the ring finger |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_RFJ1 |
hinge |
angle (rad) |
17 |
Angular position of the DIP joint of the ring finger |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_RFJ0 |
hinge |
angle (rad) |
18 |
Angular position of the CMC joint of the little finger |
-1 |
1 |
0 (rad) |
0.7(rad) |
A_LFJ4 |
hinge |
angle (rad) |
19 |
Horizontal angular position of the MCP joint of the little finger (adduction/abduction) |
-1 |
1 |
-0.44 (rad) |
0.44(rad) |
A_LFJ3 |
hinge |
angle (rad) |
20 |
Vertical angular position of the MCP joint of the little finger (flexion/extension) |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_LFJ2 |
hinge |
angle (rad) |
21 |
Angular position of the PIP joint of the little finger (flexion/extension) |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_LFJ1 |
hinge |
angle (rad) |
22 |
Angular position of the DIP joint of the little finger |
-1 |
1 |
0 (rad) |
1.6 (rad) |
A_LFJ0 |
hinge |
angle (rad) |
23 |
Horizontal angular position of the CMC joint of the thumb finger |
-1 |
1 |
-1.047 (rad) |
1.047 (rad) |
A_THJ4 |
hinge |
angle (rad) |
24 |
Vertical Angular position of the CMC joint of the thumb finger |
-1 |
1 |
0 (rad) |
1.3 (rad) |
A_THJ3 |
hinge |
angle (rad) |
25 |
Horizontal angular position of the MCP joint of the thumb finger (adduction/abduction) |
-1 |
1 |
-0.26 (rad) |
0.26(rad) |
A_THJ2 |
hinge |
angle (rad) |
26 |
Vertical angular position of the MCP joint of the thumb finger (flexion/extension) |
-1 |
1 |
-0.52 (rad) |
0.52 (rad) |
A_THJ1 |
hinge |
angle (rad) |
27 |
Angular position of the IP joint of the thumb finger (flexion/extension) |
-1 |
1 |
-1.571 (rad) |
0 (rad) |
A_THJ0 |
hinge |
angle (rad) |
Observation Space¶
The observation space is of the type Box(-inf, inf, (39,), float64). It contains information about the angular position of the finger joints, the pose of the palm of the hand, as well as state of the latch and door.
Num |
Observation |
Min |
Max |
Joint Name (in corresponding XML file) |
Site Name (in corresponding XML file) |
Joint Type |
Unit |
|---|---|---|---|---|---|---|---|
0 |
Angular position of the vertical arm joint |
-Inf |
Inf |
ARRx |
- |
hinge |
angle (rad) |
1 |
Angular position of the horizontal arm joint |
-Inf |
Inf |
ARRy |
- |
hinge |
angle (rad) |
2 |
Roll angular value of the arm |
-Inf |
Inf |
ARRz |
- |
hinge |
angle (rad) |
3 |
Angular position of the horizontal wrist joint |
-Inf |
Inf |
WRJ1 |
- |
hinge |
angle (rad) |
4 |
Angular position of the vertical wrist joint |
-Inf |
Inf |
WRJ0 |
- |
hinge |
angle (rad) |
5 |
Horizontal angular position of the MCP joint of the forefinger |
-Inf |
Inf |
FFJ3 |
- |
hinge |
angle (rad) |
6 |
Vertical angular position of the MCP joint of the forefinge |
-Inf |
Inf |
FFJ2 |
- |
hinge |
angle (rad) |
7 |
Angular position of the PIP joint of the forefinger |
-Inf |
Inf |
FFJ1 |
- |
hinge |
angle (rad) |
8 |
Angular position of the DIP joint of the forefinger |
-Inf |
Inf |
FFJ0 |
- |
hinge |
angle (rad) |
9 |
Horizontal angular position of the MCP joint of the middle finger |
-Inf |
Inf |
MFJ3 |
- |
hinge |
angle (rad) |
10 |
Vertical angular position of the MCP joint of the middle finger |
-Inf |
Inf |
MFJ2 |
- |
hinge |
angle (rad) |
11 |
Angular position of the PIP joint of the middle finger |
-Inf |
Inf |
MFJ1 |
- |
hinge |
angle (rad) |
12 |
Angular position of the DIP joint of the middle finger |
-Inf |
Inf |
MFJ0 |
- |
hinge |
angle (rad) |
13 |
Horizontal angular position of the MCP joint of the ring finger |
-Inf |
Inf |
RFJ3 |
- |
hinge |
angle (rad) |
14 |
Vertical angular position of the MCP joint of the ring finger |
-Inf |
Inf |
RFJ2 |
- |
hinge |
angle (rad) |
15 |
Angular position of the PIP joint of the ring finger |
-Inf |
Inf |
RFJ1 |
- |
hinge |
angle (rad) |
16 |
Angular position of the DIP joint of the ring finger |
-Inf |
Inf |
RFJ0 |
- |
hinge |
angle (rad) |
17 |
Angular position of the CMC joint of the little finger |
-Inf |
Inf |
LFJ4 |
- |
hinge |
angle (rad) |
18 |
Horizontal angular position of the MCP joint of the little finger |
-Inf |
Inf |
LFJ3 |
- |
hinge |
angle (rad) |
19 |
Vertical angular position of the MCP joint of the little finger |
-Inf |
Inf |
LFJ2 |
- |
hinge |
angle (rad) |
20 |
Angular position of the PIP joint of the little finger |
-Inf |
Inf |
LFJ1 |
- |
hinge |
angle (rad) |
21 |
Angular position of the DIP joint of the little finger |
-Inf |
Inf |
LFJ0 |
- |
hinge |
angle (rad) |
22 |
Horizontal angular position of the CMC joint of the thumb finger |
-Inf |
Inf |
THJ4 |
- |
hinge |
angle (rad) |
23 |
Vertical Angular position of the CMC joint of the thumb finger |
-Inf |
Inf |
THJ3 |
- |
hinge |
angle (rad) |
24 |
Horizontal angular position of the MCP joint of the thumb finger |
-Inf |
Inf |
THJ2 |
- |
hinge |
angle (rad) |
25 |
Vertical angular position of the MCP joint of the thumb finger |
-Inf |
Inf |
THJ1 |
- |
hinge |
angle (rad) |
26 |
Angular position of the IP joint of the thumb finger |
-Inf |
Inf |
THJ0 |
- |
hinge |
angle (rad) |
27 |
Angular position of the door latch |
-Inf |
Inf |
latch |
- |
hinge |
angle (rad) |
28 |
Angular position of the door hinge |
-Inf |
Inf |
door_hinge |
- |
hinge |
angular velocity (rad/s) |
29 |
Position of the center of the palm in the x direction |
-Inf |
Inf |
- |
S_grasp |
- |
position (m) |
30 |
Position of the center of the palm in the y direction |
-Inf |
Inf |
- |
S_grasp |
- |
position (m) |
31 |
Position of the center of the palm in the z direction |
-Inf |
Inf |
- |
S_grasp |
- |
position (m) |
32 |
x position of the handle of the door |
-Inf |
Inf |
- |
S_handle |
- |
position (m) |
33 |
y position of the handle of the door |
-Inf |
Inf |
- |
S_handle |
- |
position (m) |
34 |
z position of the handle of the door |
-Inf |
Inf |
- |
S_handle |
- |
position (m) |
35 |
x positional difference from the palm of the hand to the door handle |
-Inf |
Inf |
- |
S_handle,S_grasp |
- |
position (m) |
36 |
y positional difference from the palm of the hand to the door handle |
-Inf |
Inf |
- |
S_handle,S_grasp |
- |
position (m) |
37 |
z positional difference from the palm of the hand to the door handle |
-Inf |
Inf |
- |
S_handle,S_grasp |
- |
position (m) |
38 |
1 if the door is open, otherwise -1 |
-1 |
1 |
door_hinge |
- |
hinge |
bool |
Rewards¶
The environment can be initialized in either a dense or sparse reward variant.
In the dense reward setting, the environment returns a dense reward function that consists of the following parts:
get_to_handle: increasing negative reward the further away the palm of the hand is from the door handle. This is computed as the 3 dimensional Euclidean distance between both body frames. This penalty is scaled by a factor of0.1in the final reward.open_door: squared error of the current door hinge angular position and the open door state. The final reward is scaled by0.1.velocity_penalty: Minor velocity penalty for the full dynamics of the environments. Used to bound the velocity of the bodies in the environment. It equals the norm of all the joint velocities. This penalty is scaled by a factor of0.00001in the final reward.door_hinge_displacement: adds a positive reward of2if the door hinge is opened more than0.2radians,8if more than1.0randians, and10if more than1.35radians.
The sparse reward variant of the environment can be initialized by calling gym.make('AdroitHandDoorSparse-v1').
In this variant, the environment returns a reward of 10 for environment success and -0.1 otherwise.
Starting State¶
To add stochasticity to the environment the (x,y,z) coordinates of the door are randomly sampled each time the environment is reset. The values are extracted from a uniform distribution
with ranges [-0.3,-0.2] for the x coordinate, [0.25,0.35] for the y coordinate, and [0.252,0.35] for the z coordinate.
The joint values of the environment are deterministically initialized to a zero.
For reproducibility, the starting state of the environment can also be set when calling env.reset() by passing the options dictionary argument (https://gymnasium.farama.org/api/env/#gymnasium.Env.reset)
with the initial_state_dict key. The initial_state_dict key must be a dictionary with the following items:
qpos: np.ndarray with shape(30,), MuJoCo simulation joint positionsqvel: np.ndarray with shape(30,), MuJoCo simulation joint velocitiesdoor_body_pos: np.ndarray with shape(3,), cartesian coordinates of the door body
The state of the simulation can also be set at any step with the env.set_env_state(initial_state_dict) method.
Episode End¶
The episode will be truncated when the duration reaches a total of max_episode_steps which by default is set to 200 timesteps.
The episode is never terminated since the task is continuing with infinite horizon.
Arguments¶
To increase/decrease the maximum number of timesteps before the episode is truncated the max_episode_steps argument can be set at initialization. The default value is 50. For example, to increase the total number of timesteps to 400 make the environment as follows:
import gymnasium as gym
import gymnasium_robotics
gym.register_envs(gymnasium_robotics)
env = gym.make('AdroitHandDoor-v1', max_episode_steps=400)
Version History¶
v1: refactor version of the D4RL environment, also create dependency on newest mujoco python bindings maintained by the MuJoCo team in Deepmind.
v0: legacy versions in the D4RL.